Ivić, S., Crnković, B., Grbčić, L., Matleković, L.
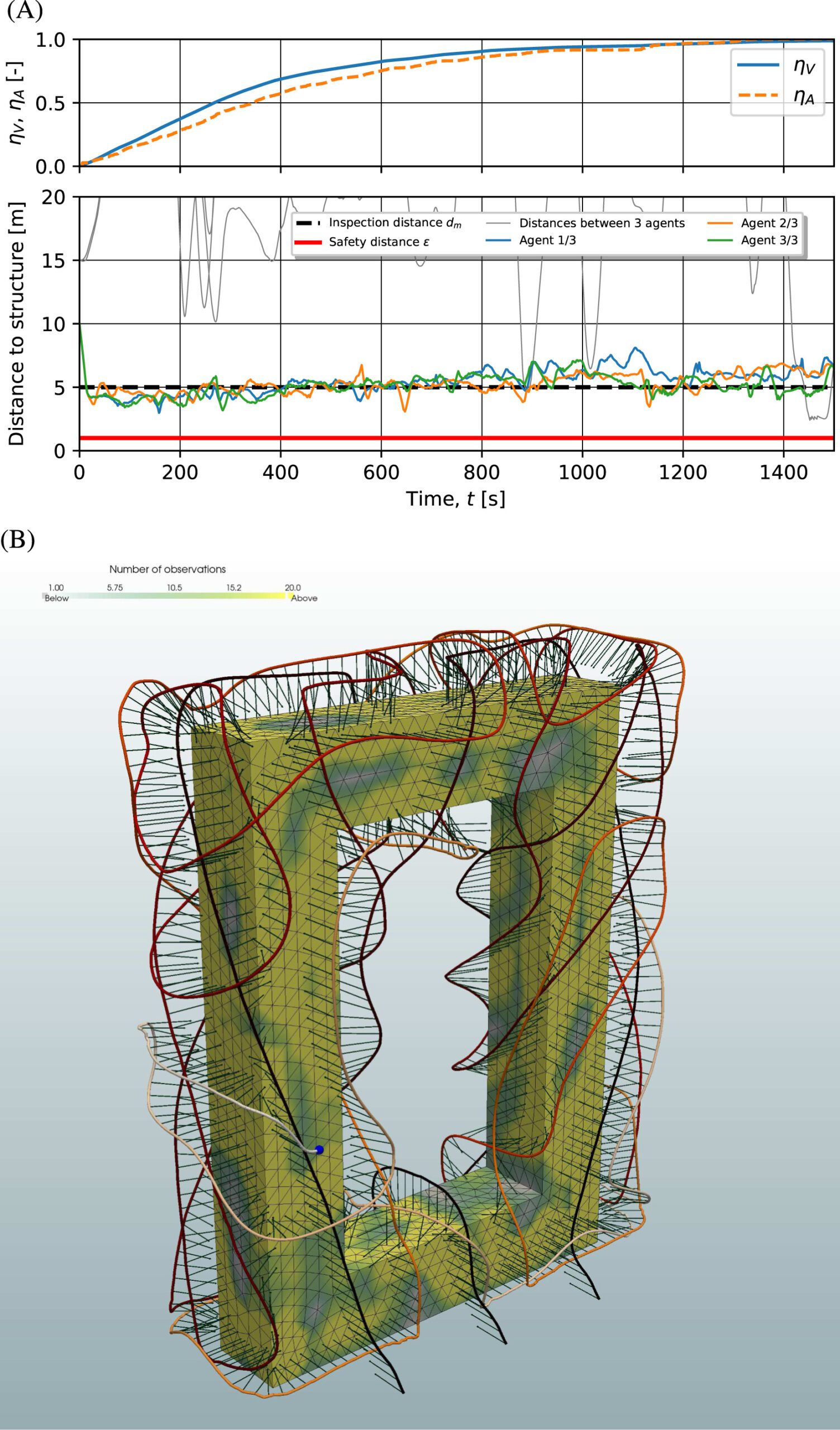
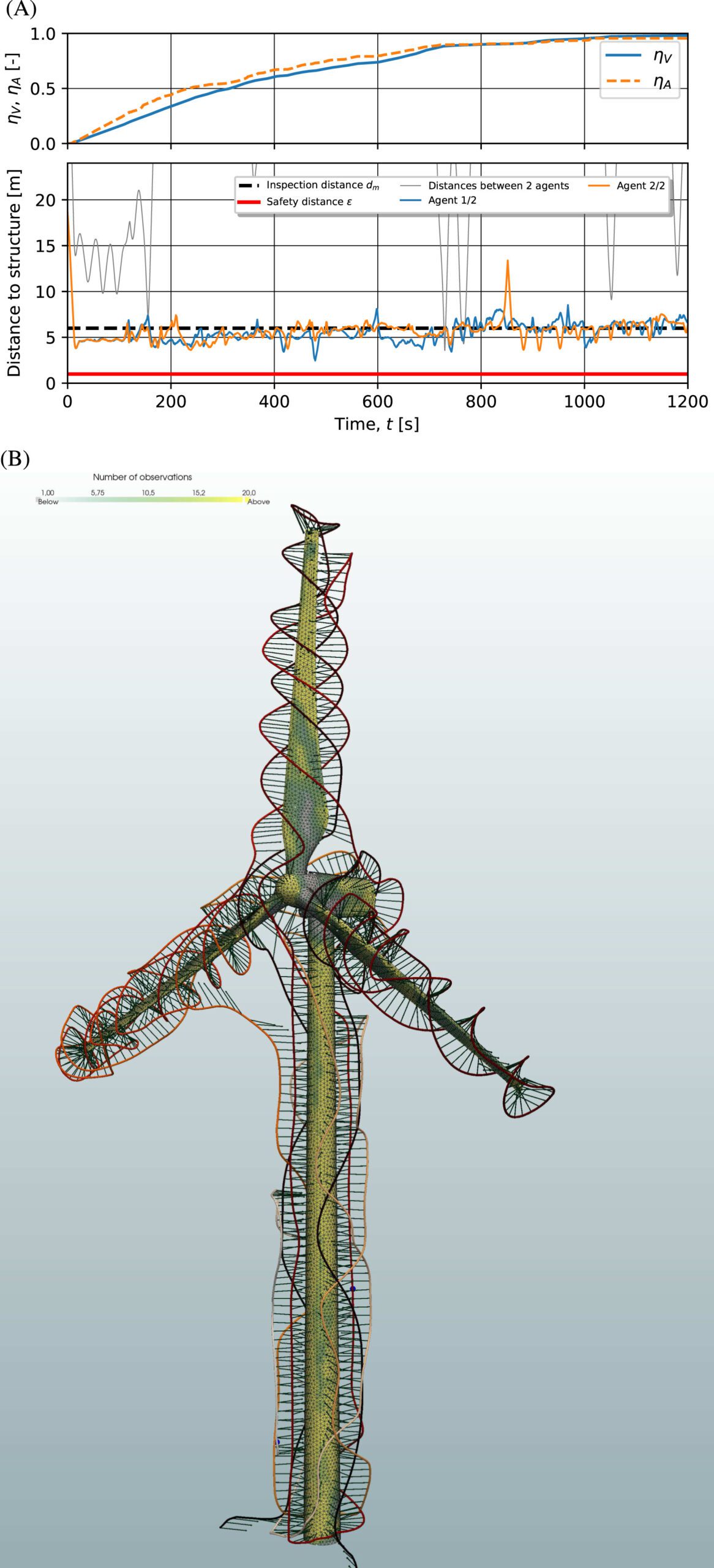
Multi-UAV trajectory planning for 3D visual inspection of complex structures
Automation in Construction, (2022), doi.org/10.1016/j.autcon.2022.104709, (quartile Q1)
Abstract: The application of autonomous UAVs to infrastructure inspection tasks provides benefits in terms of operation time reduction, safety, and cost-effectiveness. This paper presents trajectory planning for three-dimensional autonomous multi-UAV volume coverage and visual inspection of infrastructure based on the Heat Equation Driven Area Coverage (HEDAC) algorithm. The method generates trajectories using a potential field and implements distance fields to prevent collisions and to determine UAVs’ camera orientation. It successfully achieves coverage during the visual inspection of complex structures such as a wind turbine and a bridge, outperforming a state-of-the-art method by allowing more surface area to be inspected under the same conditions. The presented trajectory planning method offers flexibility in various setup parameters and is applicable to real-world inspection tasks. Conclusively, the proposed methodology could potentially be applied to different autonomous UAV tasks, or even utilized as a UAV motion control method if its computational efficiency is improved.